What Is a Prompt Engineer and How Can You Become an AI Prompt Engineer?
What is an AI Prompt Engineer, what skills are required, and how to enter Prompt Engineering? A complete, practical, and future-oriented guide.

What AI models does a physical humanoid robot need? From perception and vision to decision-making, motion control, memory, and safety considerations.
order to understand their environment, make decisions, interact with humans, and perform complex movements.
This article, What Artificial Intelligence Models Does a Physical Humanoid Robot Need?, explores these components thoroughly and in detail using a complete and structured approach.
In this text, a summary of the importance of AI models in humanoid robots is first presented, followed by an analysis of all intelligence layers—from environmental perception to precise joint movement.
Humanoid robots must accurately perceive their surroundings in order to perform in a natural, human-like manner.
This perception includes seeing, hearing, motion detection, object recognition, and spatial understanding.
The required artificial intelligence models at this stage typically consist of a combination of computer vision models, depth estimation models, and SLAM.
These models enable 3D perception, distance estimation, obstacle recognition, and environmental data processing.
In addition to perception, the robot needs models for decision-making and planning.
These models determine when the robot should move, stop, change direction, and how to respond to unexpected events.
Reinforcement learning models, path-planning algorithms, and behavior systems form the foundation of decision-making in humanoid robots.
After decision-making comes the stage of motion control.
Robot control includes precise joint movement, body balance, hand-eye coordination, and accurate execution of motion commands.
Motion-control models such as PID controllers, motor-control neural networks, and stabilization algorithms are essential for smooth, natural movement.
The combination of these models enables the robot to walk like a human, manipulate objects, and avoid falling.
Perception models are responsible for analyzing environmental data.
These data are usually gathered from cameras, laser sensors, ultrasonic sensors, IMUs, microphones, and touch sensors.
Computer vision models such as YOLO, Vision Transformer, and CLIP are essential for object recognition, face detection, and motion analysis.
These models help the robot accurately identify important elements in the environment.
Depth-estimation models such as DPT or MiDaS allow the robot to understand how far objects are.
This capability is crucial for collision avoidance, navigating crowded environments, and grasping objects correctly.
Without these models, a robot cannot perceive the environment in true 3D.
SLAM (Simultaneous Localization and Mapping) is another essential component of robot perception.
Using this technology, the robot can identify its own position while simultaneously building a map of the environment.
This capability is especially critical for autonomous navigation and intelligent movement, and without it, the robot cannot traverse complex paths.

Decision-making models help the robot choose the best action in different situations.
These models act like the robot’s brain, analyzing data from perception models and converting them into physical actions.
In advanced robots, reinforcement learning plays a key role in teaching complex behaviors such as walking on uneven surfaces or interacting with humans.
For path planning, algorithms like A*, RRT*, and MPC are used to calculate the optimal route.
These algorithms must not only be fast but also flexible enough to make intelligent decisions in unfamiliar environments.
In humanoid robots, the movement path must be consistent with body physics, balance, and foot placement.
Behavior systems such as Behavior Trees or State Machines define the overall logic of the robot’s operations.
These systems act as a roadmap for decision-making, defining how the robot behaves in various situations.
This component is especially important for robots that require complex interaction with their surroundings.
Motion-control models serve as the bridge between decision-making and physical action.
After the robot decides to perform a movement, these models execute it precisely across joints, legs, and arms.
Classical controllers such as PID are used to control motor speed and stabilize movement, and they remain widely used in robotics.
For robots requiring dynamic balance, more advanced methods such as nonlinear controllers or motor-control neural networks are used.
These models maintain the robot’s balance in complex and unpredictable situations.
For example, when walking on a slippery surface, these models prevent the robot from falling.
Additionally, motor-learning models based on real or simulated data teach the robot how to move more effectively.
These models typically work with reinforcement learning or deep learning and are essential for creating natural, human-like movements in humanoid robots.
Can a humanoid robot move without artificial intelligence models?
No. Without AI models, a robot can only perform very simple, pre-programmed movements.
AI is essential for natural movement, environmental interaction, and independent decision-making.
Which model is most important for environmental perception?
Computer vision models and SLAM are the most important components of robot perception.
These two models play a critical role in object recognition and robot localization.
Why is reinforcement learning important in humanoid robots?
Because many complex movements—such as balance, walking, and interacting with humans—require learning from experience.
Reinforcement learning makes this possible.
Source » itroz Academy

What is Generative AI? A Simple and Complete Guide: From AI Basics to Architectures, Examples, Risks, and Applications — For Readers with No Prior Knowledge.
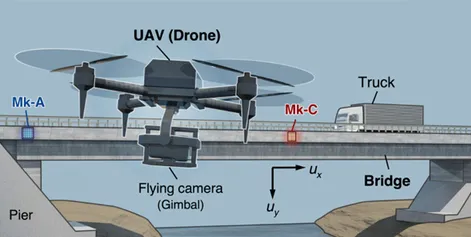
A Review of How Drones Measure Distance and Which AI Models They Use for Detection



What is Generative AI? A Simple and Complete Guide: From AI Basics to Architectures, Examples, Risks, and Applications — For Readers with No Prior Knowledge.

How to build a strong professional network and grow your career with practical techniques and examples for career advancement and professional skills.

Comments (0)