مهندس پرامپت چیست و چگونه میتوان مهندس پرامپت هوش مصنوعی شد؟
مهندس پرامپت هوش مصنوعی چیست، چه مهارتهایی دارد و چگونه میتوان وارد شغل Prompt Engineering شد؟ راهنمای جامع، کاربردی و آیندهمحور

ربات فیزیکی انسان نما چه مدلهای هوش مصنوعی نیاز دارد؛ از ادراک و بینایی تا تصمیمگیری، کنترل حرکت، حافظه و ملاحظات ایمنی.
رباتهای انساننما امروزه برای اینکه بتوانند محیط را درک کنند، تصمیم بگیرند، با انسان ارتباط برقرار کنند و حرکات پیچیده انجام دهند، به ترکیبی از مدلهای ادراکی، برنامهریزی، زبانی و کنترل نیاز دارند.
در مقاله ربات فیزیکی انسان نما به چه مدلهای هوش مصنوعی نیاز دارد؟ با رویکردی کامل بخشها را با جزئیات کامل بررسی میکند.
در این متن، ابتدا چکیدهای از اهمیت مدلهای هوش مصنوعی در رباتهای انساننما ارائه میشود و سپس تمامی لایههای هوش از ادراک محیط تا حرکت دقیق مفاصل تحلیل میگردد.
رباتهای انساننما برای عملکرد طبیعی و مشابه انسان، باید محیط اطراف خود را با دقت بالا درک کنند.
این درک شامل دیدن، شنیدن، تشخیص حرکت، تشخیص اشیا و شناسایی موقعیت است.
مدلهای هوش مصنوعی موردنیاز در این مرحله معمولاً ترکیبی از مدلهای بینایی کامپیوتری، تشخیص عمق و SLAM هستند.
این مدلها امکان مشاهده سهبعدی، تشخیص فاصله، شناسایی موانع و پردازش اطلاعات محیطی را فراهم میکنند.
در کنار ادراک، ربات به مدلهایی برای تصمیمگیری و برنامهریزی نیاز دارد.
این مدلها تعیین میکنند ربات چه زمانی حرکت کند، چه زمانی توقف کند، از چه مسیری عبور نماید و در مواجهه با شرایط غیرمنتظره چگونه واکنش نشان دهد.
مدلهای یادگیری تقویتی، الگوریتمهای برنامهریزی مسیر و سیستمهای رفتاری، اساس تصمیمگیری در رباتهای انساننما را تشکیل میدهند.
پس از تصمیمگیری، نوبت به کنترل حرکات میرسد.
کنترل ربات شامل حرکت دقیق مفاصل، تعادل بدن، هماهنگی دست و چشم، و اجرای دقیق دستورات حرکتی است.
مدلهای کنترل حرکتی مثل PID، شبکههای عصبی حرکتی و الگوریتمهای پایدارسازی، برای ایجاد حرکات روان و طبیعی ضروریاند.
ترکیب این مدلها، ربات را قادر میسازد همانند انسان راه برود، اشیا را جابهجا کند و از سقوط جلوگیری نماید.
مدلهای ادراکی وظیفه تحلیل دادههای محیطی را برعهده دارند.
این دادهها معمولاً از دوربینها، سنسورهای لیزری، سنسورهای اولتراسونیک، IMU، میکروفونها و سنسورهای لمسی دریافت میشوند.
مدلهای بینایی کامپیوتری مانند YOLO، Vision Transformer و CLIP برای شناسایی اشیا، تشخیص چهره و تحلیل حرکت بسیار مهم هستند.
این مدلها کمک میکنند ربات با دقت بالا عناصر مهم محیط را درک کند.
مدلهای تشخیص عمق و تخمین فاصله مانند DPT یا MiDaS این امکان را فراهم میکنند که ربات بداند هر جسم در چه فاصلهای قرار دارد.
این قابلیت برای جلوگیری از برخورد، حرکت در محیطهای شلوغ و برداشتن صحیح اشیا ضروری است.
بدون این مدلها، ربات نمیتواند به صورت سهبعدی محیط را بشناسد.
SLAM (همزمانیابی و نقشهبرداری) یکی دیگر از بخشهای حیاتی در ادراک ربات است.
با استفاده از این فناوری، ربات میتواند موقعیت خود را تشخیص دهد و همزمان نقشه محیط را بسازد.
این قابلیت بهویژه برای حرکت مستقل و ناوبری هوشمند بسیار ضروری است و بدون آن ربات نمیتواند مسیرهای پیچیده را طی کند.

مدلهای تصمیمگیری به ربات کمک میکنند تا بهترین اقدام را در شرایط مختلف انتخاب کند.
این مدلها مانند مغز عمل میکنند و دادههای دریافتشده از مدلهای ادراکی را تحلیل کرده و به اقدامات فیزیکی تبدیل میکنند.
در رباتهای پیشرفته، یادگیری تقویتی نقش کلیدی در آموزش رفتارهای پیچیده مانند راه رفتن روی سطوح ناهموار یا تعامل با انسان دارد.
در برنامهریزی مسیر، الگوریتمهایی مثل A*، RRT* و MPC برای محاسبه بهترین مسیر استفاده میشوند.
این الگوریتمها نهتنها باید سریع باشند، بلکه باید منعطف بوده و در محیطهای ناشناخته بتوانند بهترین تصمیم را بگیرند.
در رباتهای انساننما، مسیر حرکت باید با فیزیک بدن، تعادل و موقعیت پاها همخوانی داشته باشد.
سیستمهای رفتاری مانند Behavior Trees یا State Machines ساختارهایی هستند که منطق کلی عملکرد ربات را تعریف میکنند.
این سیستمها مانند یک نقشه راه برای تصمیمگیری عمل کرده و تعریف میکنند ربات در شرایط مختلف چه اقدامی انجام دهد.
این بخش برای رباتهایی که نیازمند تعامل پیچیده با محیط هستند بسیار مهم است.
مدلهای کنترل حرکت، رابط بین تصمیمگیری و عمل فیزیکی هستند.
پس از اینکه ربات تصمیم میگیرد یک حرکت را انجام دهد، این مدلها وظیفه دارند حرکت را بهطور دقیق روی مفاصل، پاها و بازوها اجرا کنند.
کنترلرهای کلاسیک مانند PID برای کنترل سرعت موتور و تثبیت حرکات استفاده میشوند و هنوز هم در بسیاری از رباتها کاربرد دارند.
برای رباتهایی که نیاز به تعادل پویا دارند، از مدلهای پیشرفتهتر مانند کنترلکنندههای غیرخطی یا شبکههای عصبی حرکتی استفاده میشود.
این مدلها میتوانند در شرایط پیچیده و غیرقابلپیشبینی، تعادل ربات را حفظ کنند.
برای مثال، وقتی ربات روی یک سطح لغزنده راه میرود، این مدلها وظیفه جلوگیری از سقوط را برعهده دارند.
همچنین مدلهای یادگیری حرکتی با استفاده از دادههای واقعی یا شبیهسازی شده، به ربات آموزش میدهند چگونه بهتر حرکت کند.
این مدلها معمولاً با یادگیری تقویتی یا شبکههای عمیق کار میکنند و برای ایجاد حرکات طبیعیتر در ربات انساننما ضروری هستند.
آیا ربات انساننما بدون مدلهای هوش مصنوعی میتواند حرکت کند؟
خیر. بدون مدلهای هوش مصنوعی، ربات تنها میتواند حرکات بسیار ساده و از پیش تعیینشده انجام دهد.
برای حرکت طبیعی، تعامل با محیط و تصمیمگیری مستقل، هوش مصنوعی ضروری است.
کدام مدل برای درک محیط مهمتر است؟
مدلهای بینایی کامپیوتری و SLAM مهمترین بخشهای ادراک ربات هستند.
این دو مدل نقش حیاتی در شناسایی اشیا و موقعیتیابی ربات ایفا میکنند.
چرا یادگیری تقویتی در ربات انساننما مهم است؟
زیرا بسیاری از حرکات پیچیده مانند تعادل، راه رفتن و تعامل با انسان نیازمند یادگیری از تجربه هستند.
یادگیری تقویتی این فرآیند را ممکن میکند.
منبع » آکادمی ایتروز

هوش مصنوعی مولد چیست؟ راهنمای ساده و کامل: از پایههای AI تا معماریها، مثالها، خطرات و کاربردها — برای خوانندهٔ بدون پیشزمینه.
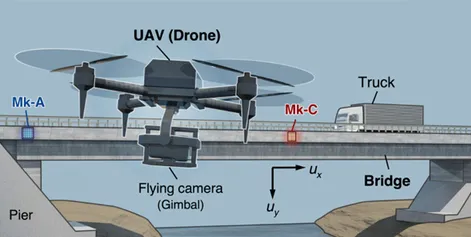
بررسی نحوه تخمین فاصله در پهپاد ها چگونه است؟ از چه مدل های هوش مصنوعی برای تشخیص استفاده می کنند؟



هوش مصنوعی مولد چیست؟ راهنمای ساده و کامل: از پایههای AI تا معماریها، مثالها، خطرات و کاربردها — برای خوانندهٔ بدون پیشزمینه.

چگونه شبکه ارتباط کاری قوی بسازیم و حرفهای رشد کنیم با تکنیکها و مثالهای عملی برای پیشرفت شغلی و مهارتهای حرفهای.

نظرات (0)